STM32F4VE DS18B20 HD44780 Keil в этой статье мы подключим и выведем информацию на один из популярный ЖК индикаторов китайского производства LCD 4x20. В этом индикаторе отсутствует таблица русских символов!!! Есть в одном известном китайским интернет магазине с русской таблицей стоит правда, дороже. Вот ссылка !! Не знаю сколько просуществует магазин, но если нужно пока есть .. LCD 4x20 на микроконтроллере я кратко описал в статье LCD 1x16, 2x16, 4x20 HD44780. Подключать LCD 4x20 к плате STM32F4VE будем через расширитель портов PCF8574 статья.
Ds18b20
Подключим к STM32F4VE - порт РE 2.
LCD 4x20
На плате STM32F4VE будем использовать I2C как альтернативный

подключаем проводами к PCF8574
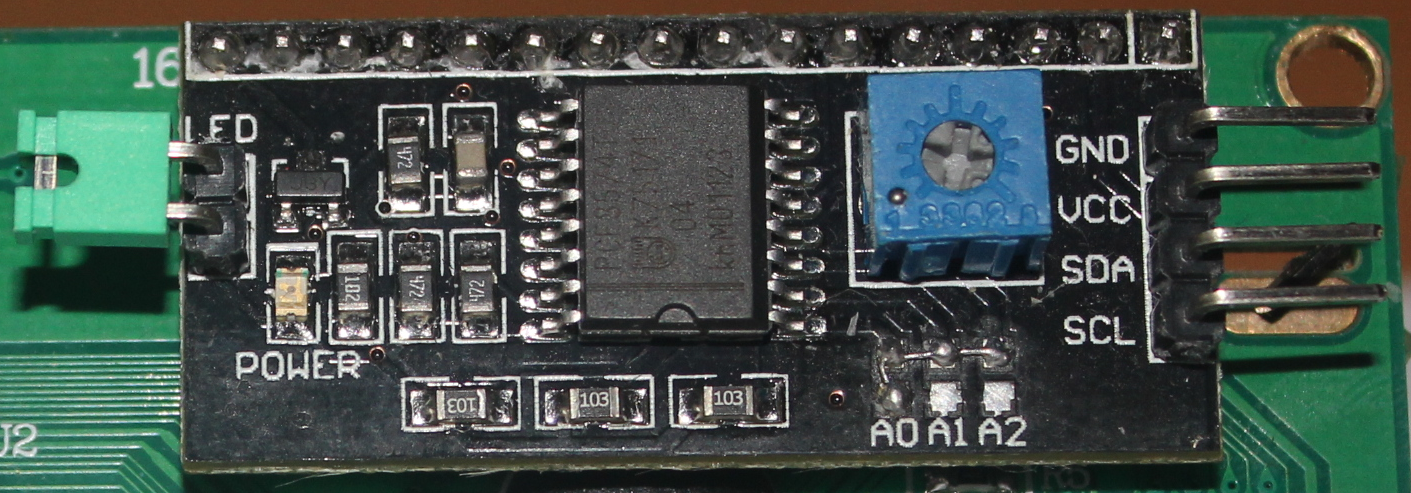
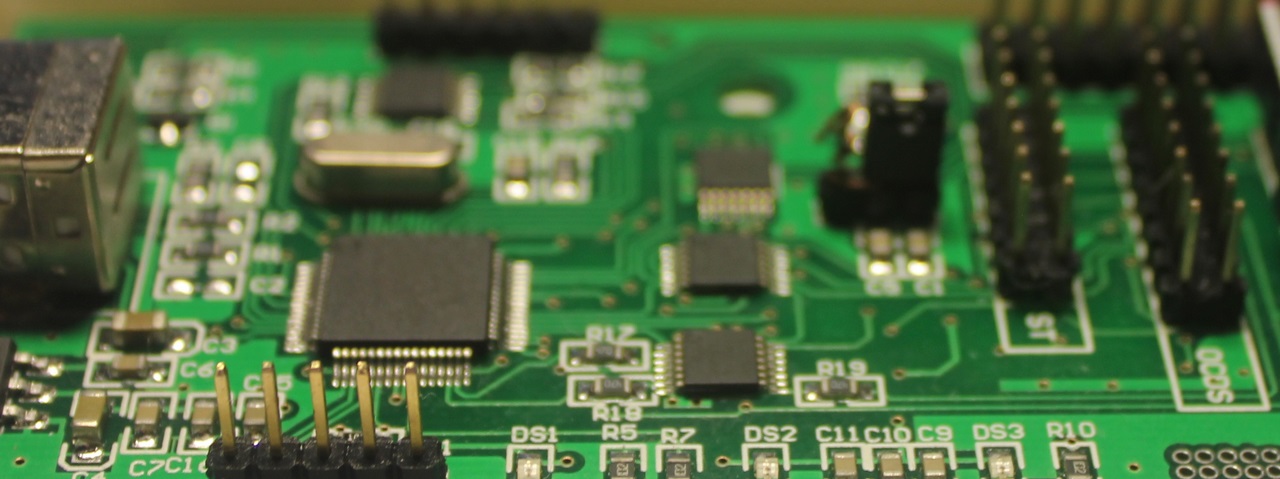
Плата с PCF8574 STM32F4VE
GND -> GND
VCC -> VCC подключаем на + 5B!!!!!!
SDA -> PB11
SCL -> PB10
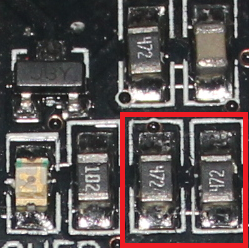
Подтяжка SDA и SCL у нас есть 4.7 k (см. ниже отметил красным)
Адресация запаяна перемычками на GND!!
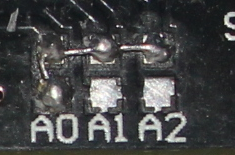
Определим сразу адрес микросхемы PCF8574 для "общения"
Из документации на PCF8574
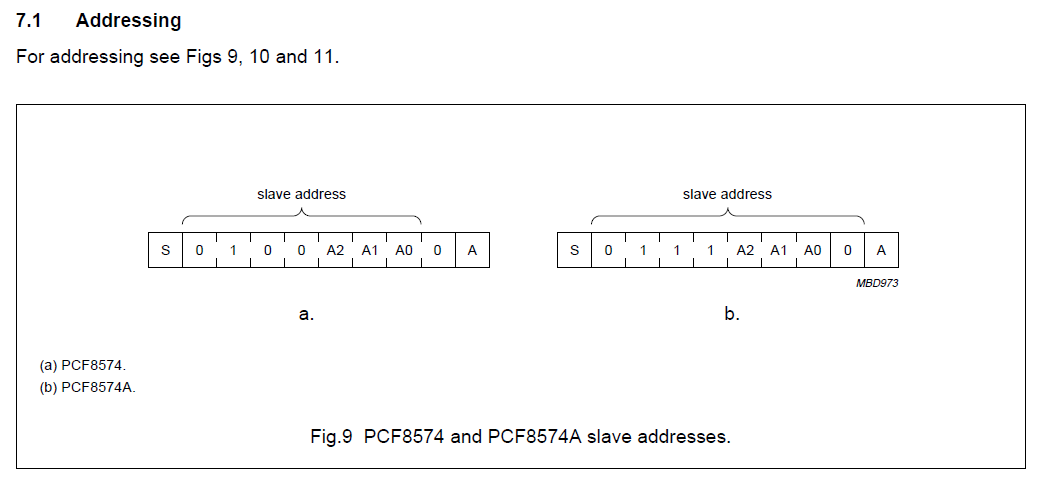
У меня на плате установлена микросхема PCF8574T и A2A1A0 (запаяны на GND) т.е. A2 = 0, A1 = 0, A0 = 0 подставляем
S 0100 0000 A - где 0100 0000 - адрес в BIN переведем в калькуляторе Windows
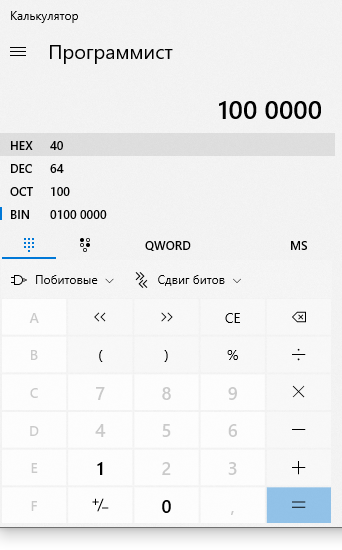
Получим в HEX - 40h - запомним это !!!
На этом все подключения заканчиваются.
Перейдем к написанию программы.
Проект будем создавать в Keil uVision5 версии V5.29.0.0
Проект создать самому, можно взять готовый. Можем создать сами - отлично ! Просто читаем дальше. Для тех у кого пока не получается самостоятельно - скачиваем архив созданный ранее, с начальными настройками - ссылка.
Открываем Keil и начинаем ..
Я возьму за основу ранее созданный проект с начальными настройками и дополню его необходимы.
Приступим
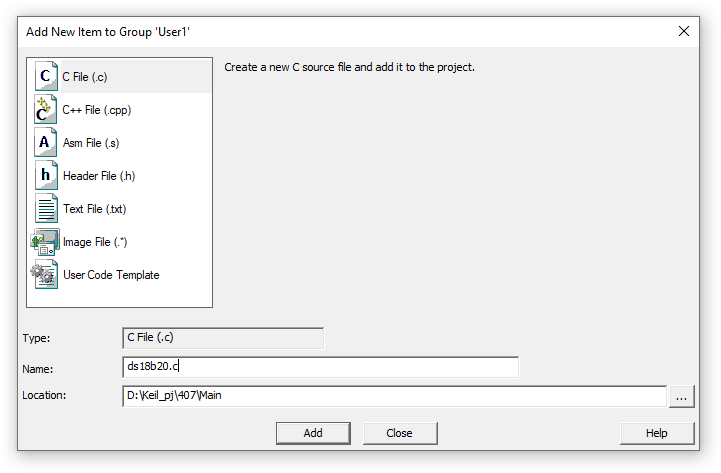
В проект необходимо добавит следующие файлы:
i2c_lcd_HD44780.с
i2c_lcd_HD44780.h
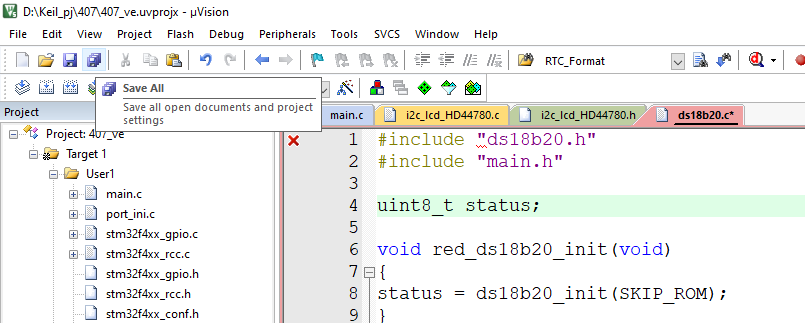
ds18b20.c
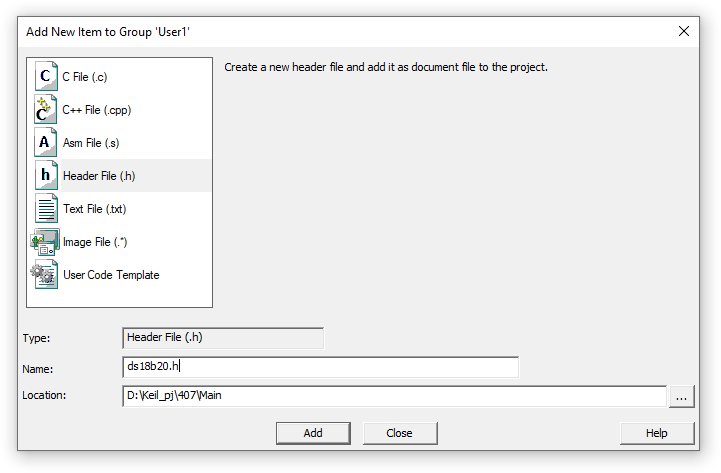
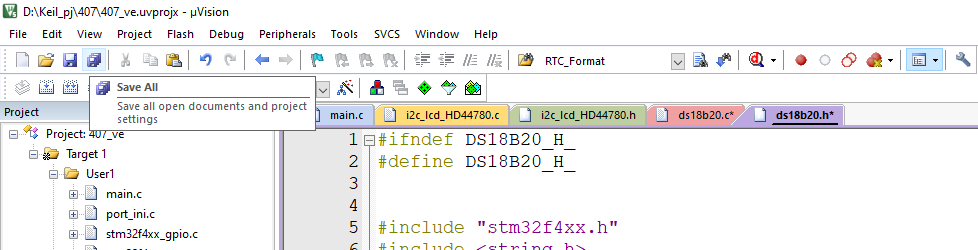
ds18b20.h
Начнем создавать и заполнять содержимым
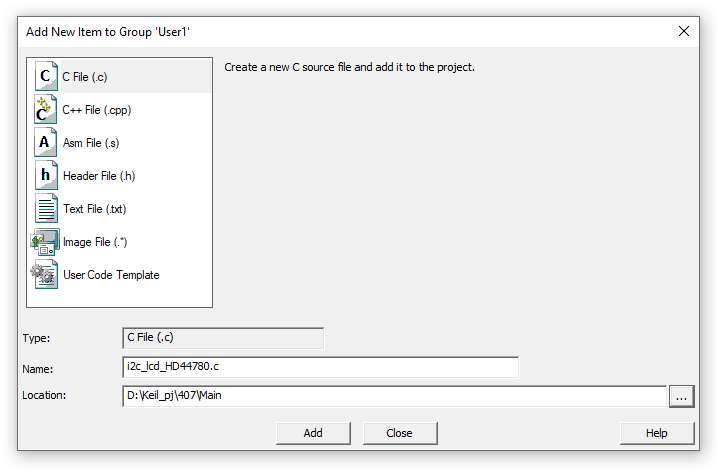
НЕ забываем правильно указывать папку хранения созданных файлов!!!
Содержимое файла
i2c_lcd_HD44780.c
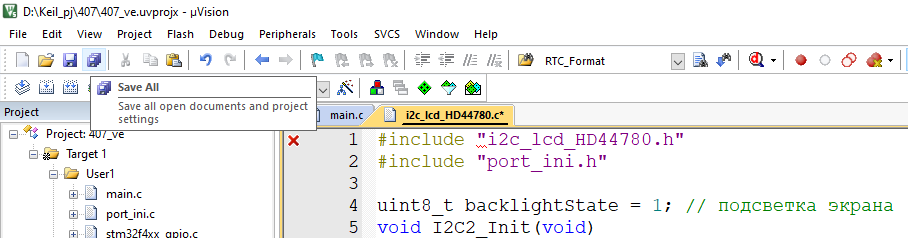
Начало файла i2c_lcd_HD44780.c
***********************************************************************************
#include "i2c_lcd_HD44780.h"
#include "port_ini.h"
uint8_t backlightState = 1; // подсветка экрана
void I2C2_Init(void)
{
GPIO_InitTypeDef I2C_user;
I2C_InitTypeDef i2c;
// Включаем тактирование
RCC_APB1PeriphClockCmd(RCC_APB1Periph_I2C2, ENABLE);
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE);
// I2C использует две ноги микроконтроллера, их тоже нужно настроить
I2C_user.GPIO_Pin = GPIO_Pin_10 | GPIO_Pin_11;
I2C_user.GPIO_Mode = GPIO_Mode_AF;
I2C_user.GPIO_Speed = GPIO_Speed_50MHz;
I2C_user.GPIO_OType = GPIO_OType_OD;
I2C_user.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOB, &I2C_user);
GPIO_PinAFConfig(GPIOB, GPIO_PinSource10, GPIO_AF_I2C2);
GPIO_PinAFConfig(GPIOB, GPIO_PinSource11, GPIO_AF_I2C2);
// Включаем I2C
I2C_Cmd(I2C2, ENABLE);
// настройка I2C
i2c.I2C_ClockSpeed = 100000;
i2c.I2C_Mode = I2C_Mode_I2C;
i2c.I2C_DutyCycle = I2C_DutyCycle_2;
i2c.I2C_OwnAddress1 = 0;
i2c.I2C_Ack = I2C_Ack_Disable;
i2c.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;
I2C_Init(I2C2, &i2c);
}
void lcd_Goto(uint8_t row, uint8_t col) { // выбираем строчку для вывода
#ifdef LCD_2004
switch (row){
case 1:
lcd_Command(0x80 + col);
break;
case 2:
lcd_Command(0x80 + col + 0x40);
break;
case 3:
lcd_Command(0x80 + col + 0x14);
break;
case 4:
lcd_Command(0x80 + col + 0x54);
break;
}
#endif
}
void lcd_PrintC(const uint8_t *str) { // Вывод строки
uint8_t i;
while (i = *str++){
lcd_Data(i);
}
}
void lcd_Init(void) { // Инициализация индикатора
I2C2_Init();
lcd_Command(0x33);
delay_ms(30);
lcd_Command(0x32); //
lcd_Command(0x28); //
lcd_Command(0x08); //
lcd_Command(0x01); //
delay_ms(30);
lcd_Command(0x06); //
lcd_Command(0x0C); //
}
void lcd_Send(uint8_t data) {
while(I2C_GetFlagStatus(I2C2, I2C_FLAG_BUSY));
I2C_GenerateSTART(I2C2, ENABLE);
while(!I2C_CheckEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT));//(0x40+LCD_ADDR) << 1
I2C_Send7bitAddress(I2C2, LCD_ADDR, I2C_Direction_Transmitter);
while(!I2C_CheckEvent(I2C2, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED));
I2C_SendData(I2C2, data);
while(!I2C_CheckEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTED));
I2C_GenerateSTOP(I2C2, ENABLE);
}
void lcd_Command(uint8_t com) {
uint8_t data = 0;
data |= (backlightState & 0x01) << BL;
data |= (((com & 0x10) >> 4) << DB4);
data |= (((com & 0x20) >> 5) << DB5);
data |= (((com & 0x40) >> 6) << DB6);
data |= (((com & 0x80) >> 7) << DB7);
lcd_Send(data);
data |= (1 << EN);
lcd_Send(data);
delay_us(200);
data &= ~(1 << EN);
lcd_Send(data);
delay_us(200);
data = 0;
data |= (backlightState & 0x01) << BL;
data |= (((com & 0x01) >> 0) << DB4);
data |= (((com & 0x02) >> 1) << DB5);
data |= (((com & 0x04) >> 2) << DB6);
data |= (((com & 0x08) >> 3) << DB7);
lcd_Send(data);
data |= (1 << EN);
lcd_Send(data);
delay_us(200);
data &= ~(1 << EN);
lcd_Send(data);
delay_us(200);
}
void lcd_Backlight(uint8_t state) {
backlightState = (state & 0x01) << BL;
lcd_Send(backlightState);
}
void lcd_Data(uint8_t com) {
uint8_t data = 0;
data |= (1 << EN);
data |= (1 << RS);
data |= (backlightState & 0x01) << BL;
data |= (((com & 0x10) >> 4) << DB4);
data |= (((com & 0x20) >> 5) << DB5);
data |= (((com & 0x40) >> 6) << DB6);
data |= (((com & 0x80) >> 7) << DB7);
lcd_Send(data);
delay_us(200);
data &= ~(1 << EN);
lcd_Send(data);
delay_us(200);
data = 0;
data |= (1 << EN);
data |= (1 << RS);
data |= (backlightState & 0x01) << BL;
data |= (((com & 0x01) >> 0) << DB4);
data |= (((com & 0x02) >> 1) << DB5);
data |= (((com & 0x04) >> 2) << DB6);
data |= (((com & 0x08) >> 3) << DB7);
lcd_Send(data);
delay_us(200);
data &= ~(1 << EN);
lcd_Send(data);
delay_us(200);
}
***********************************************************************************
Конец файла i2c_lcd_HD44780.c
Сохраняем
Переходим к следующему файлу
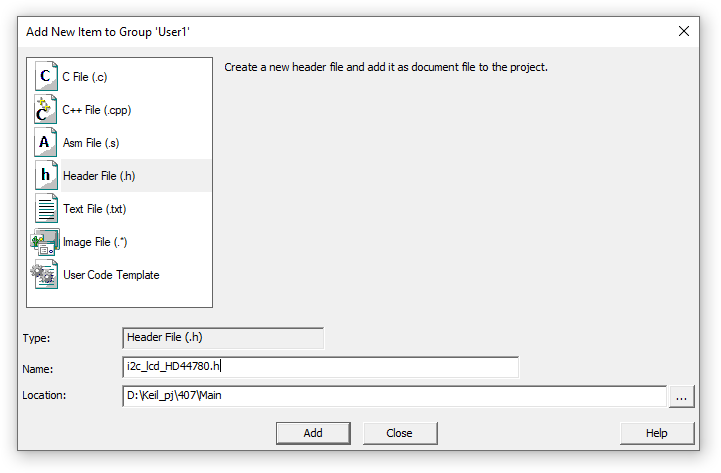
Содержимое файла
i2c_lcd_HD44780.h
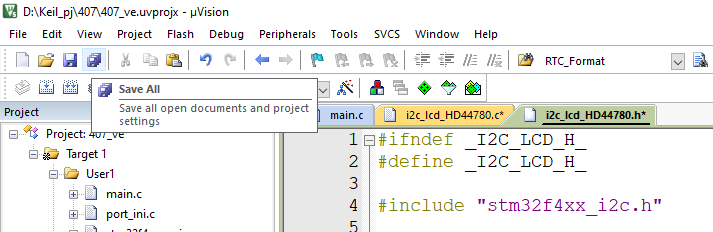
Начало файла i2c_lcd_HD44780.h
***********************************************************************************
#ifndef _I2C_LCD_H_
#define _I2C_LCD_H_
#include "stm32f4xx_i2c.h"
// PCF8574
#define LCD_ADDR 0x40 // адрес PCF8574T
//
#define LCD_2004 // Выбор 4-х строчного индикатора
//#define LCD_1602 // Выбор 2-х строчного индикатора
//- данной программе отключено
//
#define PCF_P0 0
#define PCF_P1 1
#define PCF_P2 2
#define PCF_P3 3
#define PCF_P4 4
#define PCF_P5 5
#define PCF_P6 6
#define PCF_P7 7
//
#define DB4 PCF_P4
#define DB5 PCF_P5
#define DB6 PCF_P6
#define DB7 PCF_P7
#define EN PCF_P2
#define RW PCF_P1
#define RS PCF_P0
#define BL PCF_P3
//
extern uint8_t backlightState;
void lcd_Init(void); //
void lcd_Backlight(uint8_t state); //
void lcd_Goto(uint8_t row, uint8_t col); //
void lcd_PrintC(const uint8_t *str); //
//
void lcd_Send(uint8_t data); //
void lcd_Command(uint8_t com); //
void lcd_Data(uint8_t com); //
#endif
***********************************************************************************
Конец файла i2c_lcd_HD44780.h
Сохраняем
Продолжим
Содержимое файла
ds18b20.c
Начало файла ds18b20.c
***********************************************************************************
#include "ds18b20.h"
#include "main.h"
uint8_t status;
void red_ds18b20_init(void)
{
status = ds18b20_init(SKIP_ROM);
}
uint8_t ds18b20_Reset(void)
{
uint16_t status;
GPIO_ResetBits(GPIOE, GPIO_Pin_2); // Устанавливаем на ножке PE - "0"
delay_us(485);// Задерживаемся на 485 микросекунд
GPIO_SetBits(GPIOE, GPIO_Pin_2); // Устанавливаем на ножке PE1 - "1"
delay_us(65);// Задерживаемся на 65 микросекунд
status = GPIOE->IDR & GPIO_IDR_IDR_2;//Проверяем ответила ли DS18b20 на шине
delay_us(485);// Задерживаемся на 485 микросекунд
return (status ? 1 : 0);//Возвращаем результат
}
//--------------------------------------------------
uint8_t ds18b20_ReadBit(void)
{
uint8_t bit = 0;
GPIO_ResetBits(GPIOE, GPIO_Pin_2); // Устанавливаем на ножке PE1 - "0"
delay_us(2);// Задерживаемся на 2 микросекунды
GPIO_SetBits(GPIOE, GPIO_Pin_2); // Устанавливаем на ножке PE1 - "1"
delay_us(13);// Задерживаемся на 13 микросекунды
bit = (GPIOE->IDR & GPIO_IDR_IDR_2 ? 1 : 0);//Проверяем ответила ли DS18b20 на шине
delay_us(45);// Задерживаемся на 45 микросекунд
return bit;
}
//-----------------------------------------------
uint8_t ds18b20_ReadByte(void)
{
uint8_t data = 0;
for (uint8_t i = 0; i <= 7; i++)
data += ds18b20_ReadBit() << i;
return data;
}
//-----------------------------------------------
void ds18b20_WriteBit(uint8_t bit)
{
GPIO_ResetBits(GPIOE, GPIO_Pin_2); // Устанавливаем на ножке PE1 - "0"
delay_us(bit ? 3 : 65); ///65
GPIO_SetBits(GPIOE, GPIO_Pin_2); // Устанавливаем на ножке PE1 - "1"
delay_us(bit ? 65 : 3); ///65
}
//-----------------------------------------------
void ds18b20_WriteByte(uint8_t dt)
{
for (uint8_t i = 0; i < 8; i++)
{
ds18b20_WriteBit(dt >> i & 1);
delay_us(5);
}
}
//----------------------------------------------------------
uint8_t ds18b20_init(uint8_t mode)
{
if(ds18b20_Reset()) return 1;
if(mode==SKIP_ROM)
{
ds18b20_WriteByte(0xCC);
//WRITE SCRATCHPAD
ds18b20_WriteByte(0x4E);
//TH REGISTER 100 градусов
ds18b20_WriteByte(0x64);
//TL REGISTER - 30 градусов
ds18b20_WriteByte(0x9E);
//Resolution 12 bit
ds18b20_WriteByte(RESOLUTION_12BIT);
}
return 0;
}
//----------------------------------------------------------
void ds18b20_MeasureTemperCmd(uint8_t mode, uint8_t DevNum)
{
ds18b20_Reset();
if(mode==SKIP_ROM)
{
//SKIP ROM
ds18b20_WriteByte(0xCC);
}
//CONVERT T
ds18b20_WriteByte(0x44);
}
//----------------------------------------------------------
void ds18b20_ReadStratcpad(uint8_t mode, uint8_t *Data, uint8_t DevNum)
{
uint8_t i;
ds18b20_Reset();
if(mode==SKIP_ROM)
{
//SKIP ROM
ds18b20_WriteByte(0xCC);
}
//READ SCRATCHPAD
ds18b20_WriteByte(0xBE);
for(i=0;i<8;i++)
{
Data[i] = ds18b20_ReadByte();
}
}
//----------------------------------------------------------
uint8_t ds18b20_GetSign(uint16_t dt)
{
//Проверяем 11 бит
if (dt&(1<<11)) return 1;
else return 0;
}
//----------------------------------------------------------
float ds18b20_Convert(uint16_t dt)
{
float t;
t = (float) ((dt&0x07FF)>>4); // Отбросил знаковые и дробные биты
//Прибавим дробную часть
t += (float)(dt&0x000F) / 16.0f;
return t;
}
***********************************************************************************
Конец файла ds18b20.c
Сохраняем
Продолжаем
Содержимое файла
ds18b20.h
Начало файла ds18b20.h
***********************************************************************************
#ifndef DS18B20_H_
#define DS18B20_H_
#include "stm32f4xx.h"
#include <string.h>
#include <stdlib.h>
#include <stdint.h>
#define SKIP_ROM 0
#define NO_SKIP_ROM 1
#define RESOLUTION_9BIT 0x1F
#define RESOLUTION_10BIT 0x3F
#define RESOLUTION_11BIT 0x5F
#define RESOLUTION_12BIT 0x7F
uint8_t ds18b20_init(uint8_t mode);
void ds18b20_MeasureTemperCmd(uint8_t mode, uint8_t DevNum);
void ds18b20_ReadStratcpad(uint8_t mode, uint8_t *Data, uint8_t DevNum);
uint8_t ds18b20_GetSign(uint16_t dt);
float ds18b20_Convert(uint16_t dt);
void red_ds18b20_init(void);
#endif /* DS18B20_H_ */
***********************************************************************************
Конец файла ds18b20.h
Сохраняем
Теперь поправим файлы существующие в проекте
Файл port_ini.с добавим порт для DS18B20
Содержимое файла
port_ini.с
Начало файла port_ini.с
***********************************************************************************
#include "port_ini.h"
uint16_t delay_count;
#define DWT_CYCCNT *(volatile unsigned long *)0xE0001004
#define DWT_CONTROL *(volatile unsigned long *)0xE0001000
#define SCB_DEMCR *(volatile unsigned long *)0xE000EDFC
// Прерывание - ЭТО ОБЯЗАТЕЛЬНО!!
void SysTick_Handler(void)
{
if (delay_count > 0)
{
delay_count --;
}
}
// Задержка Микро
void delay_us(uint32_t us) // Микро секунды 10-6
{
int32_t us_count_tick = us * (SystemCoreClock/1000000);
//разрешаем использовать счётчик
SCB_DEMCR |= CoreDebug_DEMCR_TRCENA_Msk;
//обнуляем значение счётного регистра
DWT_CYCCNT = 0;
//запускаем счётчик
DWT_CONTROL |= DWT_CTRL_CYCCNTENA_Msk;
while(DWT_CYCCNT < us_count_tick);
//останавливаем счётчик
DWT_CONTROL &= ~DWT_CTRL_CYCCNTENA_Msk;
}
// Задержка МиЛи
void delay_ms(uint32_t ms) // МиЛи секунды 10-3
{
int32_t ms_count_tick = ms * (SystemCoreClock/1000);
//разрешаем использовать счётчик
SCB_DEMCR |= CoreDebug_DEMCR_TRCENA_Msk;
//обнуляем значение счётного регистра
DWT_CYCCNT = 0;
//запускаем счётчик
DWT_CONTROL|= DWT_CTRL_CYCCNTENA_Msk;
while(DWT_CYCCNT < ms_count_tick);
//останавливаем счётчик
DWT_CONTROL &= ~DWT_CTRL_CYCCNTENA_Msk;
}
void sdelay_ms(uint16_t delay_temp)
{
delay_count = delay_temp;
while (delay_count)
{
};
}
// Конфигурируем порты для управления светодиодами встроенными в плату
void GPIO_init(void)
{
GPIO_InitTypeDef GPIO_InitStructure; // создаем структуру
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB,ENABLE); // включаем тактирования порта В
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE); // включаем тактирование порта А
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOE,ENABLE); // включаем тактирование порта E
// Настройка порта под сверодиод -> выход PB0 выход PB1
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_Init(GPIOB, &GPIO_InitStructure);
// Светодиод на плате подключенный к порту выход РА 6
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_InitStructure.GPIO_OType = GPIO_OType_OD;
GPIOA->ODR ^= GPIO_Pin_6;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// Светодиод на плате подключенный к порту выход РА 7
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_OType = GPIO_OType_OD;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIOA->ODR ^= GPIO_Pin_7;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// ds18b20 к порту выход РE 2
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_Init(GPIOE, &GPIO_InitStructure);
}
// Конфигурируем порты для управления кнопками встроенными в плату
void button_ini(void)
{
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOE,ENABLE); // включаем тактирование порта А
GPIO_InitTypeDef init_button;
// Кнопка на плате подключенная к порту РЕ 3
init_button.GPIO_Pin = GPIO_Pin_3;
init_button.GPIO_Mode = GPIO_Mode_IN;
init_button.GPIO_Speed = GPIO_Low_Speed ;
init_button.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOE, &init_button);
// Кнопка на плате подключенная к порту РЕ 4
init_button.GPIO_Pin = GPIO_Pin_4;
init_button.GPIO_Mode = GPIO_Mode_IN;
init_button.GPIO_Speed = GPIO_Low_Speed ;
init_button.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOE, &init_button);
}
// Конфигурируем USART2
void USART2_Configuration(void)
{
// USART2 у которого:
// USART2 TX - PA2
// USART2 RX - PA3
GPIO_InitTypeDef GPIO_InitStructure; // Создаем структуру порта
USART_InitTypeDef USART_InitStructure; // Создаем структуру USART2
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE); //Включаем тактирование порта A
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2, ENABLE); //Включаем тактирование порта USART2
// Можно сделать одной строчкой работает и так и так
// RCC_APB1PeriphClockCmd(RCC_AHB1Periph_GPIOA | RCC_APB1Periph_USART2,ENABLE);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource3, GPIO_AF_USART2); //Подключаем PA3 к TX USART2
GPIO_PinAFConfig(GPIOA, GPIO_PinSource2, GPIO_AF_USART2); //Подключаем PA2 к RX USART2
//Конфигурируем PA2 как альтернативную функцию -> TX UART2.
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//Конфигурируем PA3 как альтернативную функцию -> RX UART.
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// Конфигурируем настройки USART2
USART_InitStructure.USART_BaudRate = 115200; //Скорость обмена 115200 бод
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //Длина слова 8 бит
USART_InitStructure.USART_StopBits = USART_StopBits_1; //1 стоп-бит
USART_InitStructure.USART_Parity = USART_Parity_No ; //Без проверки четности
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //Без аппаратного контроля
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //Включен передатчик и приемник USART2
// Можно задать настройки по умолчанию строкой
// USART_StructInit(&USART_InitStructure);
USART_Init(USART2, &USART_InitStructure); // Инициализируем структуру
USART_Cmd(USART2, ENABLE); //Включаем UART
}
***********************************************************************************
Конец файла port_ini.с
Далее ...
Дополним port_ini.h добавив в него определение ds18b20
Содержимое файла
port_ini.h
Начало файла port_ini.h
***********************************************************************************
#ifndef PORT_INI_H
#define PORT_INI_H
#include "stm32f4xx.h"
#include "ds18b20.h"
void GPIO_init(void);
void button_ini(void);
void delay_ms(uint32_t ms);
void delay_us(uint32_t us);
void USART2_Configuration(void);
#endif
***********************************************************************************
Конец файла port_ini.h
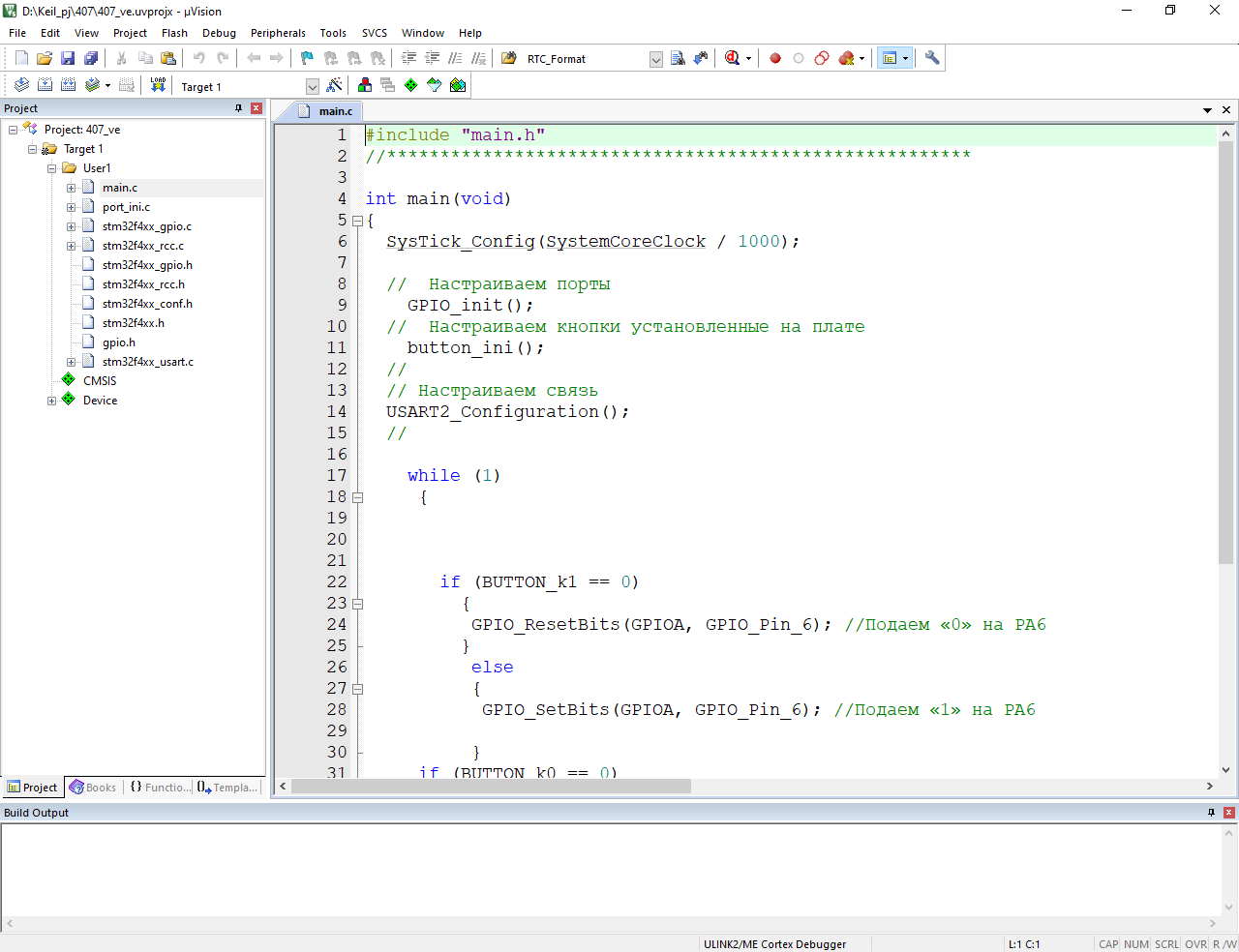
И наконец поправим main.c
Содержимое файла
main.c
Начало файла main.c
***********************************************************************************
#include "main.h"
#include <stdio.h>
#include <ds18b20.h>
#include <i2c_lcd_HD44780.h>
//*******************************************************
char str3[10];
char pstr[20];
char str4[60];
unsigned char str2[60];
uint8_t dt[8];
uint16_t raw_temper;
float temper;
char c;
uint32_t i=0;
uint32_t set=0;
//*********************************************************
int main(void)
{
SysTick_Config(SystemCoreClock / 1000);
// Настраиваем порты
GPIO_init();
// Настраиваем кнопки установленные на плате
button_ini();
// Настраиваем связь
USART2_Configuration();
// ds18b20
red_ds18b20_init();
// LCD 4x20.
lcd_Init();
//
lcd_Goto(1,2);
lcd_PrintC("www.stm32res.ru");
lcd_Goto(2, 1);
lcd_PrintC("Ds18b20 & PCF8574");
while (1)
{
ds18b20_MeasureTemperCmd(SKIP_ROM, 0); // после этой команды ждут 800 ms
// мы просто моргнем светодиодами
// НЕ просто включаем и выключаем светодиод эта задержка необходима для того
// чтобы DS18b20 успела посчитать - если необходимо эти строчки убрать - просто
// добавьте delay_ms(800); или используйте любой другой метод!!!!
GPIO_ResetBits(GPIOA, GPIO_Pin_7); //Подаем «0» на PA7
delay_ms(400);
GPIO_SetBits(GPIOA, GPIO_Pin_7); //Подаем «0» на PA7
delay_ms(400);
//
ds18b20_ReadStratcpad(SKIP_ROM, dt, 0);
raw_temper = ((uint16_t)dt[1]<<8)|dt[0];
if(ds18b20_GetSign(raw_temper)) c='-';
else c='+';
temper = ds18b20_Convert(raw_temper);
sprintf(str3,"Temperatura %c%.1f C",c, temper);
lcd_Goto(4, 0);
lcd_PrintC(str3);
}
}
***********************************************************************************
Конец файла main.c
Все сохраняем.
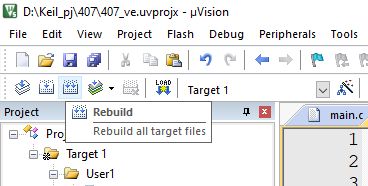
Выбираем
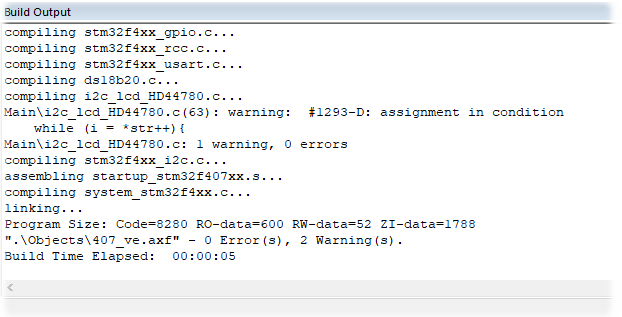
Ждем и ... получаем ошибки (если вы воспользовались моим проектом в начале статьи)
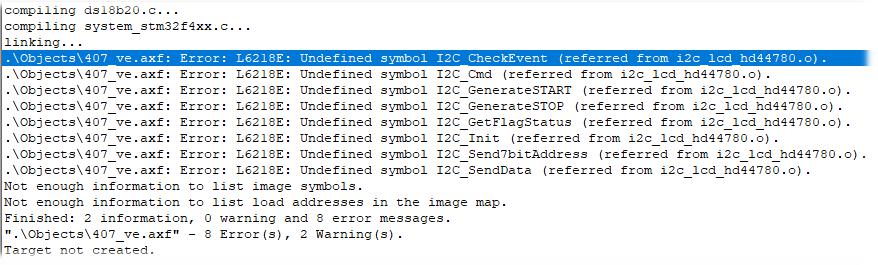
Ошибки с названием файла и расширением O т.е. например i2с_LCD_hd44700.0 говорит о том,
используется команда из одноименного файла которая не известна....
И это правильно!!! т.к. в проекте который мы дополняем (тот который было предложено скачать в начале статьи) не имеем подключенную библиотеку для работы с I2C!!!!
Отсутствует библиотеки с названием stm32f4xx_i2c.h и stm32f4xx_i2c.с - их просто надо добавить именно !! в наш проект
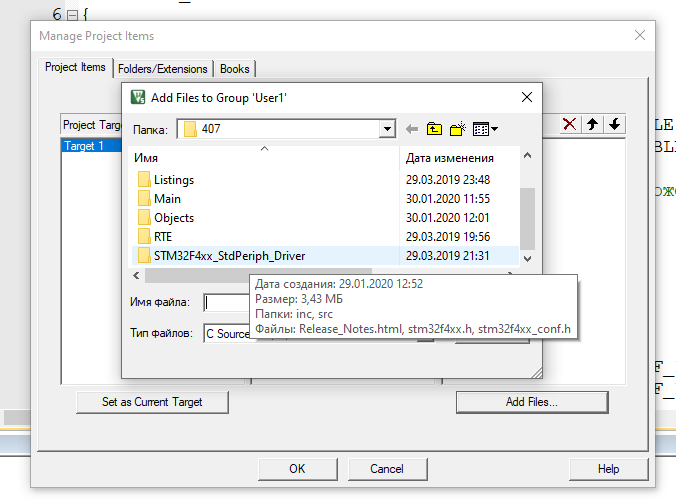
В случае использования моего начального проекта - файлы находятся по адресу
407\STM32F4xx_StdPeriph_Driver\inc\stm32f4xx_i2c.h
407\STM32F4xx_StdPeriph_Driver\scr\stm32f4xx_i2c.с
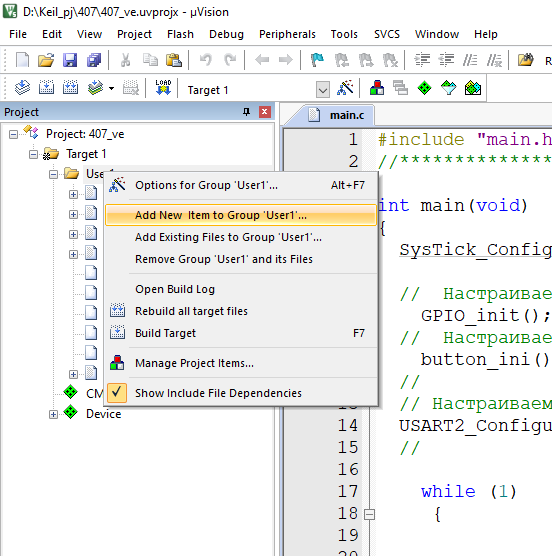
Давайте их подключим !!
Делаем следующую последовательность действий ..
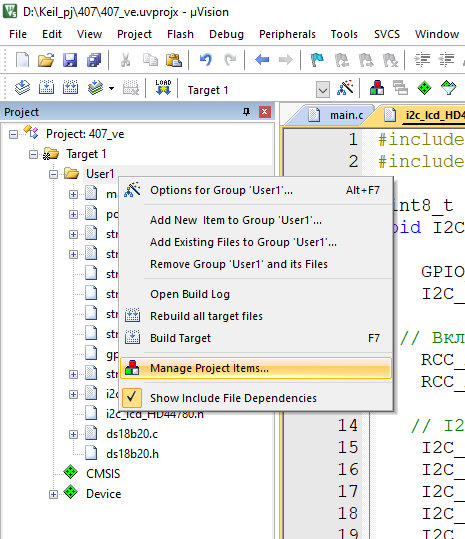
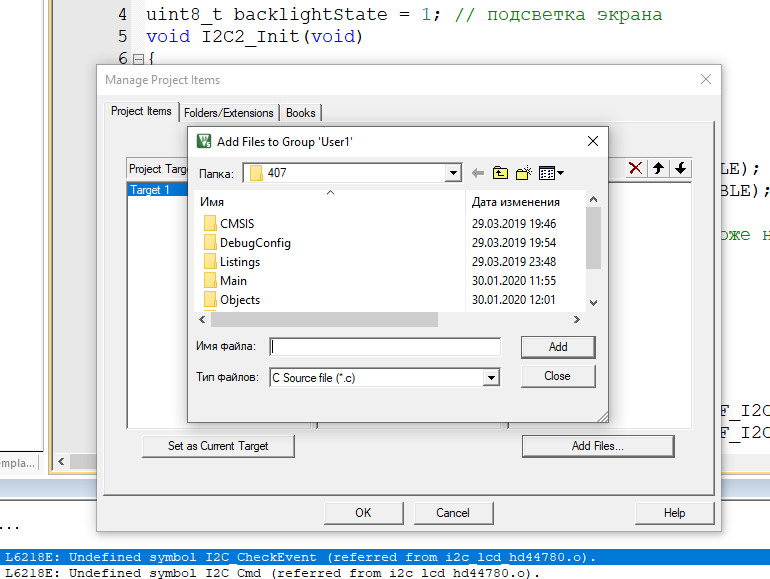
Стрелкой перемещаемся ниже к нужной нам папке
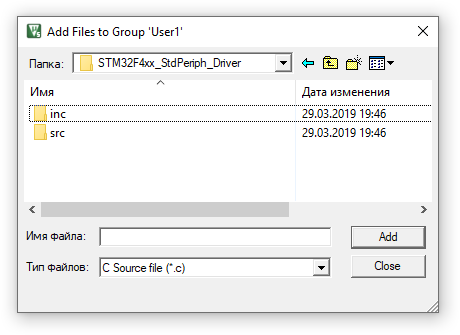
Все файлы в данном проекте с расширением *с - в папке src
Все файлы в данном проекте с расширением *h - в папке inc
Добавляем
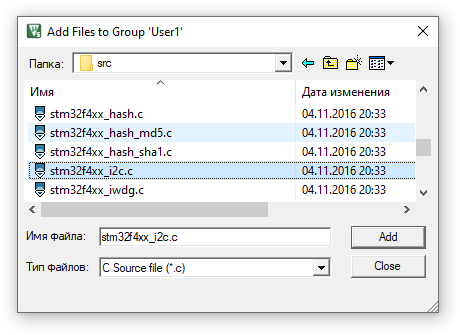
Добавляем командой Add
Переходим в папку inc выбираем тип файла - в нашем случае с расширением *h
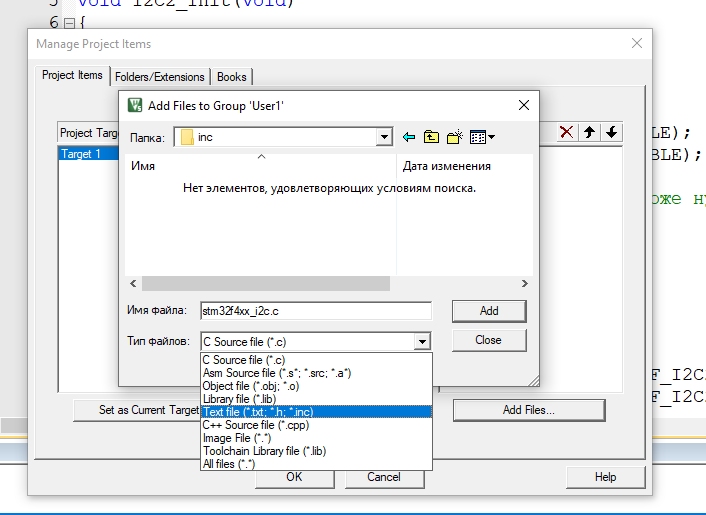
Появляются файлы - выбираем
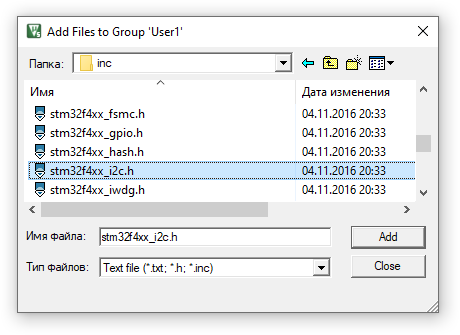
Все добавили!!
Переходим в проект и жмем
В итоге - ошибок нет !! Предупреждения пока не замечаем ..
Прошиваем наш микроконтроллер написанной программой и если все сделано как описано выше на
LCD 4x20 получим следующую картинку
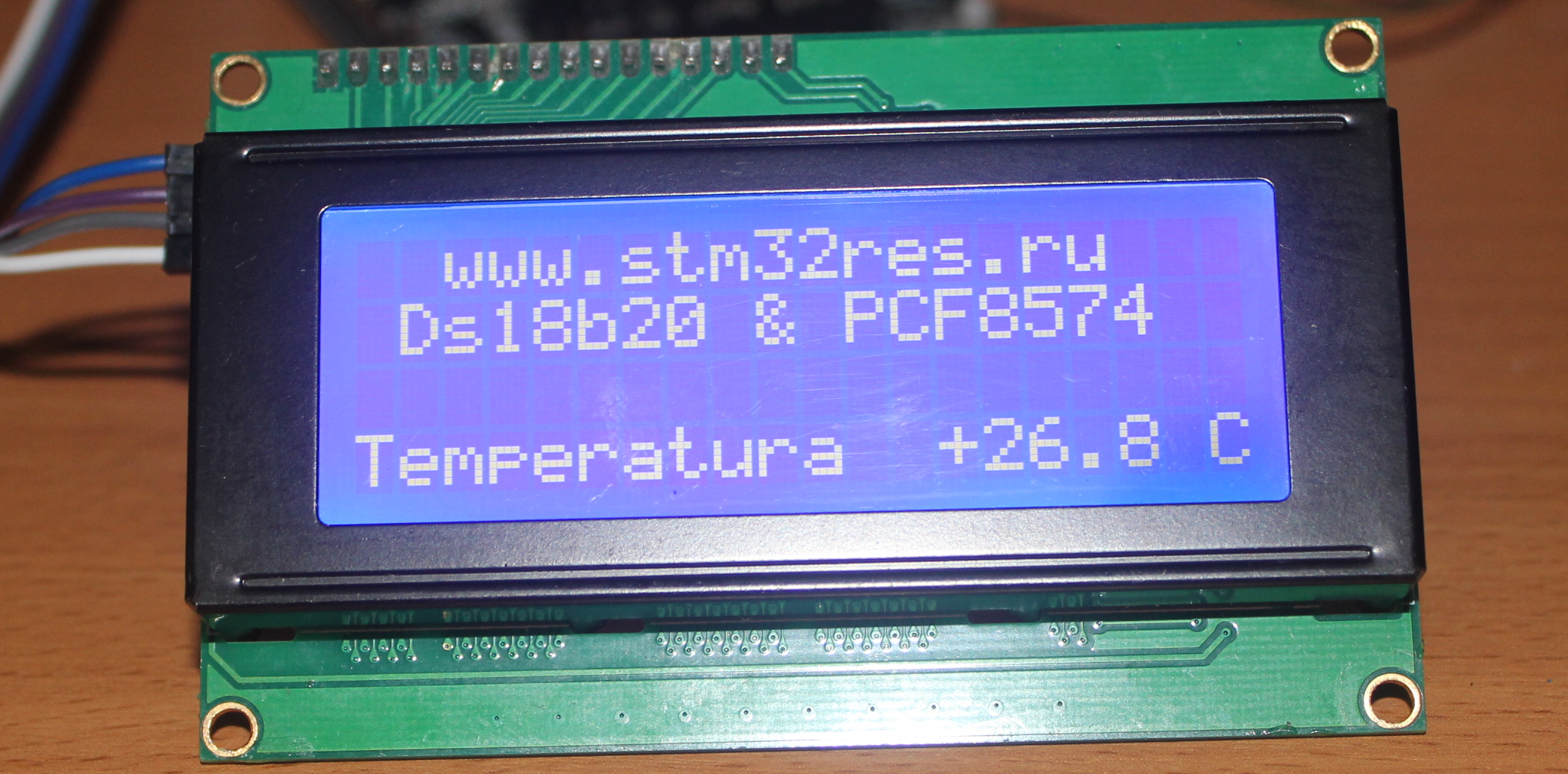
Этой же программой можно выводить и LCD 1x16 и LCD 2x16 как я показал в статье LCD 1x16, 2x16, 4x20 HD44780
Ура!! Урaaa!!!Ура!!
И если у вас это тоже получилось - то вы имеете возможность поощрить меня за мои статьи!!
- Войдите или зарегистрируйтесь, чтобы оставлять комментарии